Projections#
We denote by projection the type of operations performed within a neural network.
Those sometimes overlap with the ones used in the front-end.
Fully-Connected#
The Fully-Connected (FC) projection is the core projection of Multi-Layer-Perceptron (MLP) or Feed-Forward (FF) neural network.
MLP or FF is a sandwich of two FC with a non-linearity in between
FC are generally used as output of classification network, used within RNN/LSTM or Transformer.
When applied to all spatial (temporal) elements, it can be replaced by a Convolution with a (1x1) kernel.
torch.nn.Lineartorch.nn.Linear(in_features, out_features)
Conv-1D#
see link
Conv-2D#
The Conv-2D is the operator underlying all ConvNet archiectures (often combined with a Max-Pooling operator). It implements the following convolution with a kernel \(W\):
Figure Animated illustration of 2D-convolution; image source Link
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros')
Depthwise Separable Convolution#
Depthwise Separable Convolution (DSC) was proposed in [Cho17] in the continuation of the Inception network.
It is the concatenation of
a Depthwise Convolution (channel-wise convolution)
a Pointwise (1x1) convolution.
Rationale behind this approach
A normal convolution uses \(C_{out}\) kernels each of shape \((C_{in},3,3)\).
It necessitates \(C_{out} \times (C_{in} \times 3 \times 3)\) weights.
A DSC uses \(C_{in}\) kernels each of shape \((3,3)\), then \(C_{out}\) kernels of shape \((C_{in},1,1)\)
A DSC will only necessitates \(C_{in} \times (3 \times 3)\) and \(C_{in} \times C_{out}\) weights. The number of parameters to be learnt and of multiplications to be performed is largely reduced.
Because of this, it is largely used in model for IoT such as MobileNet [HZC+17].
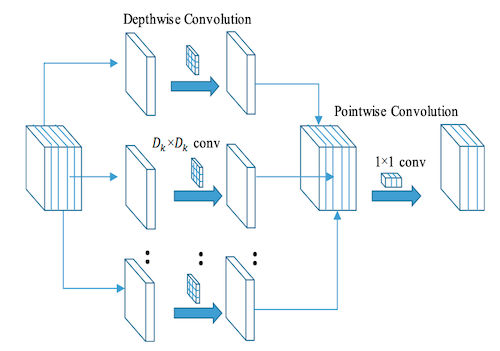
Figure
Depthwise Separable Convolution; image source: Link
# Code: https://github.com/seungjunlee96/Depthwise-Separable-Convolution_Pytorch/blob/master/DepthwiseSeparableConvolution/DepthwiseSeparableConvolution.py
class depthwise_separable_conv(nn.Module):
def __init__(self, nin, kernels_per_layer, nout, kernel_size=3, padding=1):
super(depthwise_separable_conv, self).__init__()
self.depthwise = nn.Conv2d(nin, nin * kernels_per_layer, kernel_size=kernel_size, padding=padding, groups=nin)
self.pointwise = nn.Conv2d(nin * kernels_per_layer, nout, kernel_size=1)
def forward(self, x):
out = self.depthwise(x)
out = self.pointwise(out)
return out
model = depthwise_separable_conv(16, 1, 32)
X = torch.randn(2,16,23,23)
model(X).size()
ResNet#
ResNet has been proposed by [HZRS16] in the framework of image recognition. A ResNet is made of a
large number of blocks each containing a residual connection (skip-connection).
the residual connection allows to
bypass blocks during forward, and
backward easily the gradients during training hence allows constructing very deep models (152 in the original papers).
We are interested here in the two building blocks of ResNet:
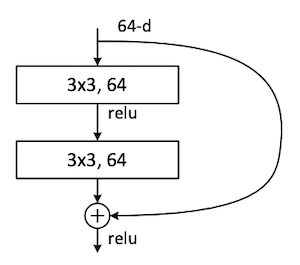
the building block:
It is a stack of - a first 2D-Convolution, - a ReLU, - a second 2D-Convolution, - the residual connection (\(\mathcal{F}(x)+x\)), - a ReLUthe “bottleneck” block:
It is a stack of 3 layers instead of 2.
The three layers are 1×1, 3×3, and 1×1 convolutions, wherethe 1×1 layers are responsible for reducing and then increasing (restoring) dimensions,
the 3×3 layer is operates in a smaller input/output dimensions.
ResNet “building” block |
ResNet “bottleneck” block |
|---|---|
|
|
Figure image source: Link |
Figure image source: Link |
 \
\# https://www.digitalocean.com/community/tutorials/writing-resnet-from-scratch-in-pytorch
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size = 3, stride = 1):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size = kernel_size, stride = stride, padding = 'same'),
nn.BatchNorm2d(out_channels),
nn.ReLU())
self.conv2 = nn.Sequential(
nn.Conv2d(out_channels, out_channels, kernel_size = kernel_size, stride = 1, padding = 'same'),
nn.BatchNorm2d(out_channels))
self.downsample = False
if in_channels != out_channels:
self.downsample = True
self.conv_ds = nn.Conv2d(in_channels, out_channels, kernel_size = 1, stride = 1, padding = 'same')
self.relu = nn.ReLU()
self.out_channels = out_channels
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.conv2(out)
if self.downsample: residual = self.conv_ds(x)
out += residual
out = self.relu(out)
return out
# https://github.com/pytorch/vision/blob/main/torchvision/models/resnet.py
class Bottleneck(nn.Module):
def __init__(self, inplanes, planes, stride, downsample, groups, base_width, dilation, norm_layer):
super().__init__()
if norm_layer is None: norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.0)) * groups
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x: Tensor) -> Tensor:
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
ConvNeXt#
ConvNeXT has been proposed in “A ConvNet for the 2020s” [LMW+22] with the goal of modernizing ResNet architecture and to remains competitive with Vision Transformers (ViTs).
It especially bases its design on the Swin Transformers:
larger kernel size (kernels are \((7 \times 7)\)),
as in Transfomer (Transfomer has a non-local self-attention, which enables each layer to have a global receptive field)
ResNeXt-ify
instead of grouped convolution use dephtwise convolution
inverted bottleneck (from 96 channels to 384 then back to 96),
as in Transformer (the hidden dimension of the MLP block is four times wider than the input dimension)
various layer-wise micro designs (use of layer normalization)
Fewer activation functions
Replacing ReLU with GELU (Gaussian Error Linear Unit)
as in Transformer which has fewer activation functions (only one activation function present in the MLP block)
In [LMW+22], it has been shown to achieve better performances than Transformer-based architecture.
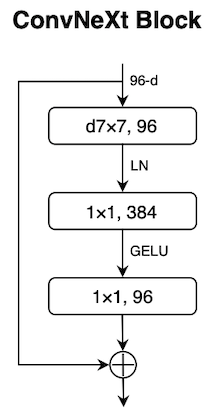
Figure
ConvNeXt block; image source: Link
# ConvNeXt CODE: https://github.com/facebookresearch/ConvNeXt/blob/main/models/convnext.py
class ConvNeXtBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=7, drop_path=0.0):
super(ConvNeXtBlock, self).__init__()
# 1. Depthwise convolution (spatial convolution with large kernel)
self.dwconv = nn.Conv2d(in_channels, in_channels, kernel_size=kernel_size, padding=kernel_size // 2, groups=in_channels)
# 2. Layer normalization applied across channels
self.norm = nn.LayerNorm(in_channels, eps=1e-6) # LayerNorm is applied after permuting to (B, C, H, W)
# 3. Pointwise convolution to project to higher dimensions (expanding and compressing channels)
self.pwconv1 = nn.Linear(in_channels, 4 * in_channels) # expand channels by 4x
self.act = nn.GELU() # GELU activation
self.pwconv2 = nn.Linear(4 * in_channels, out_channels) # project back to original channels
# 4. Stochastic depth (optional) for better regularization
self.drop_path = nn.Identity() if drop_path == 0 else StochasticDepth(drop_path)
def forward(self, x):
# Input: (B, C, H, W)
residual = x
# 1. Depthwise convolution
x = self.dwconv(x)
# 2. LayerNorm after permute to (B, H, W, C)
x = x.permute(0, 2, 3, 1) # (B, C, H, W) -> (B, H, W, C)
x = self.norm(x)
# 3. Pointwise convolutions + GELU
x = self.pwconv1(x)
x = self.act(x)
x = self.pwconv2(x)
# 4. Drop path (if applicable) and residual connection
x = x.permute(0, 3, 1, 2) # (B, H, W, C) -> (B, C, H, W)
x = self.drop_path(x) + residual # Add residual connection
return x
class StochasticDepth(nn.Module):
"""Drop paths (stochastic depth) per sample (when applied in the main path of residual blocks)."""
...